08 - KONTROL RODA BELOK KANAN DAN KIRI
- Sabtu, 09 November 2024
- Administrator
- 0 komentar
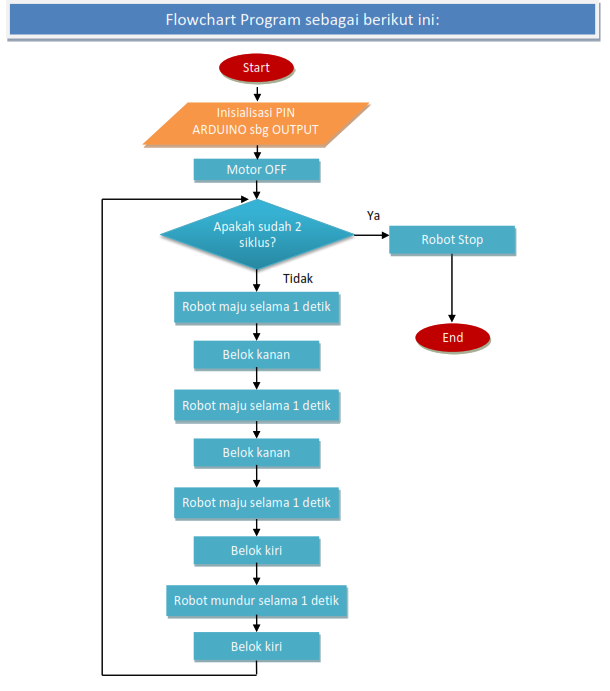
Jalanya Robot :
- Robot berjalan maju selama 1 detik - belok kekanan - maju 1 detik - belok kekanan - maju 1 detik - belok kekiri - mundur 1 detik - belok kiri.
- Robot akan mengulang 1 kali lagi.
- Robot Berhenti.

KODING :
Untuk memudahkan pemrograman, kita buat koneksi antara sensor & driver motor dengan pin Arduino seperti dibawah ini (Perhatikan skematik). const int L1 = 2; const int L2 = 3; const int R1 = 4; const int R2 = 7; const int L = 5; const int R = 6; void setup() Tentukan pin sebagai output untuk mengontrol putaran motor. pinMode(L1, OUTPUT); pinMode(L2, OUTPUT); pinMode(R1, OUTPUT); pinMode(R2, OUTPUT); pinMode(L, OUTPUT); pinMode(R, OUTPUT);
Kondisi Awal motor OFF: analogWrite(L, 0); analogWrite(R, 0);
Program perulangan 2x, robot akan mengulang proses: for (char i=0; i<2; i++)
Jalankan Robot maju selama 1 detik: digitalWrite(L1, HIGH); digitalWrite(L2, LOW); digitalWrite(R1, HIGH); digitalWrite(R2, LOW); analogWrite(L, 255); analogWrite(R, 255); delay(1000);
Robot Belok kanan dengan memutar maju roda kiri (L = 255) sedangkan roda kanan di matikan (R = 0), sehingga robot berbelok ke kanan selama ½ detik: analogWrite(L, 255); analogWrite(R, 0); delay(500);
Selanjutnya jalankan robot maju: analogWrite(L, 255); analogWrite(R, 255); delay(1000);
Selanjutnya robot belok kanan: analogWrite(L, 255); analogWrite(R, 0); delay(500);
Robot maju selama 1 detik: analogWrite(L, 255); analogWrite(R, 255); delay(1000);
Robot Belok kiri dengan memutar maju roda kanan (R = 255) sedangkan roda kiri di matikan (L = 0), sehingga robot berbelok ke kanan selama ½ detik: analogWrite(L, 0); analogWrite(R, 255); delay(500);
Robot mundur selama 1 detik: digitalWrite(L1, LOW); digitalWrite(L2, HIGH); digitalWrite(R1, LOW); digitalWrite(R2, HIGH); analogWrite(L, 255); analogWrite(R, 255); delay(1000);
Belok kiri: analogWrite(L, 255); analogWrite(R, 0); delay(500); Jika belum ada 2x siklus maka robot kembali mengerjakan perintah awal (for).
Robot Stop: analogWrite(L, 0); analogWrite(R, 0); while(1);//PROGRAM LOOPING DISINI