ROBOT PENGHALANG RINTANGAN (ROBOT BINGUNG)
- Rabu, 02 Oktober 2024
- Administrator
- 0 komentar
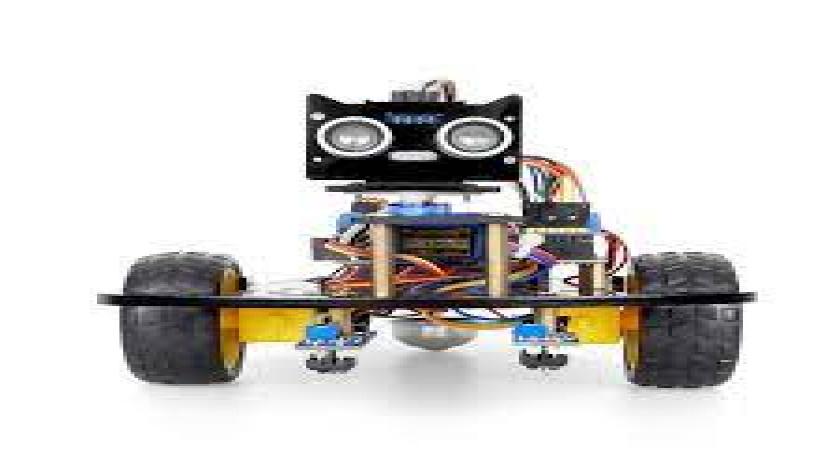
KEBUTUHAN BAHAN :
1) Arduino uno board
2) Ultrasonic Sensor (HC-SR04 )
3) DC Motors x 4
4) Motor Driver Module (L298N )
5) Wheels x 4
6) Wood sheet
7) Servo Motor (SG90)
8) Battery Pack (2x 18650 Li Ion)
9) Jumper Wires (for connecting the components)
10) Holder for Ultrasonic sensor
11) M3 Bolts







KODE PROGRAM ARDUINO :
ATAU DOWNLOAD FILE .INO
CODE PROGRAM ARDUINO :
#include #include #define R1 2#define R2 3#define L1 4#define L2 5#define trigPin 9#define echoPin 10#define servoPin 6Servo myServo;long duration;int distance, distanceRight, distanceLeft;void setup() { // Set motor control pins as output pinMode(R1, OUTPUT); pinMode(R2, OUTPUT); pinMode(L1, OUTPUT); pinMode(L2, OUTPUT); // Set ultrasonic sensor pins pinMode(trigPin, OUTPUT); pinMode(echoPin, INPUT); // Attach the servo motor myServo.attach(servoPin); myServo.write(90); // Set servo to forward position (90 degrees) // Initialize serial for debugging Serial.begin(9600); }void loop() { distance = getDistance(); if (distance > 0 && distance <= 30) { moveStop(); delay(500); moveBackward(); delay(200); moveStop(); distanceRight = lookRight(); distanceLeft = lookLeft();delay(500); if (distanceRight > distanceLeft) { turnRight(); } else { turnLeft(); } delay(300); moveStop(); } else { moveForward(); } delay(50);}// Function to get the distance from the ultrasonic sensorint getDistance() { // Trigger the ultrasonic pulse digitalWrite(trigPin, LOW); delayMicroseconds(2); digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW); // Read the echo time with a timeout of 20000 microseconds duration = pulseIn(echoPin, HIGH, 20000); // Timeout in case of no echo // If duration is zero, no echo was received if (duration == 0) { Serial.println("No echo received"); return 0; } // Calculate the distance in cm int distance = duration * 0.034 / 2; // Print the distance to the Serial Monitor Serial.print("Distance: "); Serial.println(distance); return distance;}// Look to the rightint lookRight() { myServo.write(0); delay(500); int distance = getDistance(); myServo.write(90); // Reset to forward position return distance;}// Look to the leftint lookLeft() { myServo.write(180); delay(500); int distance = getDistance(); myServo.write(90); // Reset to forward position return distance;}// Move functionsvoid moveForward() { digitalWrite(R1, HIGH); digitalWrite(R2, LOW); digitalWrite(L1, HIGH); digitalWrite(L2, LOW);}void moveBackward() { digitalWrite(R1, LOW); digitalWrite(R2, HIGH); digitalWrite(L1, LOW); digitalWrite(L2, HIGH);}void turnRight() { digitalWrite(R1, LOW); digitalWrite(R2, HIGH); digitalWrite(L1, HIGH); digitalWrite(L2, LOW);}void turnLeft() { digitalWrite(R1, HIGH); digitalWrite(R2, LOW); digitalWrite(L1, LOW); digitalWrite(L2, HIGH);}void moveStop() { digitalWrite(R1, LOW); digitalWrite(R2, LOW); digitalWrite(L1, LOW); digitalWrite(L2, LOW);}